안녕하세요. 오늘은 채널에 대해 좀 더 알아보도록 하겠습니다.
채널은 앞 전에 말씀 드렸듯이 Go언어에서 제공하는 멀티스레드용 프로그램을 좀 더 원활하게 하기 위해서 제공하는 타입이고,
Fixed Size(정해진 크기를 갖는), Thread Safe(스레드에 안정적으로 돌아가는) 큐입니다..
큐는 자료구조의 하나로써 FIFO를 제공하는 자료구조이죠.
채널도 하나의 타입인데 Slice랑 Map과 같은 Go에서 제공하는 자료구조 중에 하나라고 보면 됩니다.
그래서 chan으로 사용하면 되는데 선언은
var a chan int이렇게 사용하는데 var로 선언하고 이름은 아무거나 하고, 타입은 chan, 값의 타입은 int, string, *, 등 Go에서 사용가능한 타입은 모두 가능합니다.
Slice도 그렇고 Map도 그렇고 초기화를 해야 사용할 수 있어서
a := make(chan int, 10)이런식으로 make를 사용하여 초기화를 할 수 있는데 ','옆에 채널의 사이즈를 정할 수 있습니다.
현재 10개 사이즈에 해당하는 채널을 만들었는데 10개가 다 차더라도 채널은 자동으로 늘진 않습니다.
a := make(chan int)이렇게만 초기화 시켜주면 1개짜리가 아닌 0개짜리 채널이 만들어지는데 하나도 못집어 넣는게 아니라 0개 짜리 채널은 넣을 때 다른 곳에서 빼주지 않으면 넣는 연산이 끝이 나지 않습니다.
이것을 블로킹된다고 표현하는데 이 부분은 이따 다뤄보도록 하겠습니다.
그리고 큐는 대표적으로 Push와 Pop을 가지고 있으므로 채널 또한 Push와 Pop을 제공하는데 독특하게 화살표연산(<-)을 사용합니다. 그래서 채널을 만들 때
c := make(chan int, 1)이렇게 초기화를 시켜주고, c에 값을 넣을 때
c <- 10이렇게 c를 향해 화살표를 넣으면 Push가 되고
v := <- c값을 뺄 때는 채널에서 화살표가 나가는 쪽으로 하면 Pop이 되어 v변수에 값이 들어가게 됩니다.
이 부분을 직접 코딩하여 만들어보죠! channel이라는 폴더를 만들고, 그 안에 main.go를 생성해 줍니다.
package main
import "fmt"
func main() {
var c chan int
c = make(chan int, 1)
c <- 10
v := <-c
fmt.Println(v)
}이렇게 작성 후에 출력 결과를 보면 10이 출력 되는 것을 알 수 있습니다.

이번에는 0개짜리 int형 채널을 만들었다고 가정하여 다른 스레드에서 빼주지 않으면 넣는 구문이 끝나지 않는다고 말씀 드렸죠?
이 부분을 구현하여 어떻게 결과가 나오는지 확인해 봅시다!

deadlock이 발생했다고 출력되었고, 그 옆에 all goroutines are asleep라는 문구가 있는데 모든 고루틴이 잠자고 있다는 의미이며, deadlock이 발생하여 더 이상 진행 할 수 없다는 의미입니다.
그 이유는 c <- 10 이 부분에서 c가 0개 짜리라서 다른곳에서 빼주지 않았기 때문에 멈춘 것입니다.
이번엔 pop()을 만들어보죠!
func pop(c chan int) {
fmt.Println("pop func...")
v := <- c
fmt.Println(v)
}
func main() {
var c chan int
c = make(chan int)
go pop(c)
c <- 10
fmt.Println("end of program")
}이렇게 pop을 해주면 어떻게 되는지 확인해 봅시다!

코드를 살펴보자면 pop()이 go Thread를 통해 실행 되었기 때문에 fmt.Println("pop func...")이 먼저 찍히게 되고, 그리고 v := <- c여기에서 대기를 하고 있다가 main()에서 10을 집어 넣으면v := <- c에서 빠지기 때문에 그대로 멈추지 않고, fmt.Println("end of program")이 출력되게 됩니다.
이 부분을 자세히 설명하자면 우리가 Go Thread 2개를 만들었었는데 Go Thread1은 main(), Go Thread2는 pop()을 실행하게 됩니다. 표로 살펴보면 아래와 같습니다.
| Go Thread1 | Go Thread2 |
|---|---|
| main() | pop() |
| "pop" | |
| c <- 10 | v:= <- c |
| "end of program" | "10" |
처음에 main()에서 pop()을 만들어서 Go Thread2에서 pop을 출력을 했고, 그 다음 v에 값을 뺐는데 뺄 값이 없기 때문에 이 빼는 구문에서 값이 생길 때 까지 기다리고 있는 상태가 됩니다.
그래서 값을 넣었을 때 v:= <- c이 빠져 나오게 되고, 그 다음 10이라는 값을 출력하게 되고, Thread1은 길이가 0개짜리 이므로 c <- 10에서 값이 빠질 때까지 기다리고 있다가 Thread2에서 값이 빠졌을 때 end of program을 출력하게 됩니다.
이를 통해 길이가 0개짜리인 채널은 다른 스레드에서 값을 뺄 때 까지 기다린다는 것을 알 수 있습니다.
이 것을 통해서 어떤것을 할 수 있냐면 저번에 언급했던 컨베이어 벨트 시스템이라고 부르는 Producer - Consumer 패턴을 만들 수 있게 됩니다.
지금 이 부분을 사용하여 만들어보죠! 자동차 공장을 만든다는 가정해서 carfactory라는 폴더를 생성해주고, 그 안에 main.go를 만들어 줍니다!
package main
type Car struct {
val string
}
func MakeTire(carChan chan Car, outChan chan Car) {
car := <- carChan
car.val += "Tire, "
outChan <- car
}먼저 타이어를 만드는 함수를 만들었습니다. 차체가 넘어오는 큐인 carChan을 받아오는 함수이고, 받아온 carChan을 빼서 받아오고, val에 Tire를 추가해 주었습니다.
그리고 Tire가 추가된 것을 outChan에 집어 넣어줍니다. 이제 타이어를 만들었고, 엔진을 만드는 함수를 추가해보죠!
func MakeEngine(carChan chan Car, outChan chan Car) {
car := <- carChan
car.val += "Engine, "
outChan <- car
}타이어 만드는 함수와 구조는 같습니다. 우선은 아래와 같이 만들어주고, main()를 추가해줍니다!
func main() {
chan1 := make(chan Car)
chan2 := make(chan Car)
chan3 := make(chan Car)
go MakeTire(chan1, chan2)
go MakeEngine(chan2, chan3)
chan1 <- Car{val: "Car1: "}
result := <-chan3
fmt.Println(result.val)
}채널을 초기화 시켜주고, chan1에 Car를 하나 만들어주고, chan1에 타이어를 붙여서 chan2에 넘겨주고, chan2에 엔진을 붙여서 chan3에 넣어주니 결과값을 chan3에서 받아오면 됩니다.
그 후 출력을 시켜 결과를 확인해 봅시다!

이번에는 무한루프를 돌도록 수정해보죠!
func MakeTire(carChan chan Car, outChan chan Car) {
for {
car := <-carChan
car.val += "Tire, "
outChan <- car
}
}
func MakeEngine(carChan chan Car, outChan chan Car) {
for {
car := <-carChan
car.val += "Engine, "
outChan <- car
}
}이렇게 바꾸어주고, 차체를 입력하는 부분도 만들어 줍니다!
func StartWork(chan1 chan Car) {
i := 0
for {
time.Sleep(1 * time.Second)
chan1 <- Car{val: "Car" + strconv.Atoi(i)}
i++
}
}이렇게 1초씩 만들도록 해줍니다. 시작점이라고 생각하면 됩니다.
그 후 main()로 내려와서
func main() {
chan1 := make(chan Car)
chan2 := make(chan Car)
chan3 := make(chan Car)
go StartWork(chan1)
go MakeTire(chan1, chan2)
go MakeEngine(chan2, chan3)
for {
result := <-chan3
fmt.Println(result.val)
}
}go StartWork(chan1)를 추가 해준 뒤, 결과를 출력하는 부분도 무한 루프로 돌려줍니다. 그 후 실행을 시켜보죠!
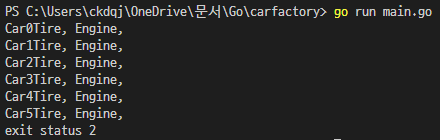
1초 단위로 쉬면서 계속 출력하는 것을 알 수 있습니다. 그래서 Go언어에서는 멀티 스레드를 제공하기 위해 Go Thread와 Channel, Select를 제공하고 있습니다.
이 3가지를 하면 굉장히 효율적으로 멀티 스레드를 만들 수 있습니다.
그래서 Go언어가 갖는 최대 강점중에 하나가 멀티스레드 환경에서 최적화된 프로그래밍을 할 수 있다는 것이 있습니다.
그렇다면 왜 멀티스레드를 사용하면 훨씬 복잡해지는 문제에 직면하게 되는데 왜 사용해야 할까요?
답은 효율적으로 만들기 위해서입니다. 머신의 성능을 최대한 이용하기 위해서죠.
예를 들어 지금 사용하는 컴퓨터가 CPU가 2개가 있다 가정하면 싱글 스레드로 하게 되면 한쪽에서만 스레드를 돌리고 있고,
다른 쪽에선 놀게 되는데 이 노는 자원을 놀지 않게 하기 위해서는 2개의 스레드를 만들어서 프로그램을 실행시키면 됩니다.
물론 싱글스레드로 할 경우에 장점이 더 많은데 프로그램이 간단해지고, DeadLock문제도 발생하지 않아 더 좋은데 멀티 스레드를 현대 프로그램에서 필수인 이유는 공짜점심 이 끝났기 때문입니다.
이 것을 이해하기 전에 무어의 법칙에 대해 알아야 하는데요. 무어가 인텔의 전 CEO인데 앞으로 인텔에서 나온 CPU는 성능이 1년에 2배씩 좋아질 것이다. 라고 했었고, 이 법칙을 지키기 위해 인텔이 엄청난 노력을 했었습니다.
근데 이 법칙이 깨져서 매년 인텔에서 2배이상 빠른 CPU를 만들어 내지 못하게 됐죠.
이유는 이미 집적도가 너무 높아졌기 때문인데 이 집적도는 CPU의 같은 면적에 얼마나 많은 트랜지스터를 집어 넣느냐가 관건인데
이 트랜지스터가 나노 공정까지 굉장히 작게 만들었었는데 너무 작게 만들다보니 물리적 한계에 부딫히게 되었습니다.
대표적으로 열이 많이 발생하게 되었고, 전자방해라고 해서 너무 집적도가 높다 보니 서로간에 전기적신호, 자기장이 발생하게 되어 제대로 컨트롤 하기가 어려워졌습니다.
그래서 이런 요소들로 인해서 CPU를 더 많이 집어 넣을 수가 없게 되었고, 현대의 CPU회사들(인텔, AMD)이 멀티코어로 가는 방향으로 취했습니다.
하나의 코어를 더 빠르게 만들지 못하니까 여러개 만들자!로 바뀌어서 쿼드, 헥사, 옥타코어 등의 들이 나오게 되었죠.
그래서 공짜점심이라는 것은 가만히 있어도 컴퓨터가 2배씩 빨라지니까 프로그램이 가만히 있어도(아무런 수정을 하지 않아도)
2배씩 빨라져서 공짜점심이라고 불렀습니다.
근데 공짜점심이 끝났다는 것은 이제 가만히 있어도 2배씩 빨라지지 않는다는 것을 의미하죠.
그렇기 때문에 이제 CPU의 성능을 다 뽑아오기 위해서는 멀티스레드를 꼭 써야겠다. 라는 것입니다.
그런데 꼭 멀티 스레드를 쓰지 않아도 됩니다. 멀티 프로세스를 해도 되죠.
현재 윈도우 운영체제는 멀티프로세스를 제공하고 있습니다. 멀티 태스킹이라고 하는데 저번에 얘기 했었지만 지금 윈도우즈도 돌리고 있는 프로그램 수가 수십개가 된다 했었죠? 이 얘기는 각각 돌아가는 프로세스가 싱글스레드여도 돌아가는 프로세스가 4개면 4개의 CPU가 각각 프로세스를 맡아서 돌릴 수 있다는 것을 의미합니다.
그렇다는 얘기는 1개의 프로세스가 4개의 스레드를 가지고 있는 것과, 4개의 프로세스가 1개의 스레드를 가지고 있는 것과 비슷하다는 얘기이죠.
물론 운영체제에서는 스레드와 프로세스를 돌리는 기준은 다르지만 비슷합니다.
그리고 현대 프로그래밍에서는 가상화가 잘 되기 때문에 가상화를 이용해서 싱글 스레드를 가지고 있는 프로세스를
수십, 수백개를 돌릴 수 있습니다.
이걸 이용하면 굳이 멀티 스레드를 사용하지 않고, 싱글 스레드로 CPU의 성능을 최대한으로 끌어 올릴 수 있지만 모든 경우에 다 맞다는 아닌점 알아야 합니다.
상황에 따라 멀티 프로세스를 가야하는 상황이 있고, 멀티 스레드로 가야 하는 상황을 알아두어야 합니다.
다음에는 Select에 대해 알아보도록 하겠습니다.
풀소스
main.go
package main
import (
"fmt"
"strconv"
"time"
)
type Car struct {
val string
}
func MakeTire(carChan chan Car, outChan chan Car) {
for {
car := <-carChan
car.val += "Tire, "
outChan <- car
}
}
func MakeEngine(carChan chan Car, outChan chan Car) {
for {
car := <-carChan
car.val += "Engine, "
outChan <- car
}
}
func StartWork(chan1 chan Car) {
i := 0
for {
time.Sleep(1 * time.Second)
chan1 <- Car{val: "Car" + strconv.Itoa(i)}
i++
}
}
func main() {
chan1 := make(chan Car)
chan2 := make(chan Car)
chan3 := make(chan Car)
go StartWork(chan1)
go MakeTire(chan1, chan2)
go MakeEngine(chan2, chan3)
for {
result := <-chan3
fmt.Println(result.val)
}
}'프로그래밍(Basic) > Golang' 카테고리의 다른 글
| [바미] Go - OOP에 대해 알아보자. (0) | 2021.03.02 |
|---|---|
| [바미] Go - Select에 대해 알아보자. (0) | 2021.03.02 |
| [바미] Go - DeadLock & channel에 대해 알아보자. (0) | 2021.03.02 |
| [바미] Go - Thread에 대해 알아보자2. (0) | 2021.03.02 |
| [바미] Go - Thread에 대해 알아보자. (0) | 2021.03.02 |